手を振りかざすと白旗を上げて降参する Arduino
簡単な説明
- 任意の言語で Raspberry Pi デジタル入出力、アナログ出力 (PWM)
- Raspberry Pi で I2C を利用するための設定
- Raspberry Pi アナログ入力 (I2C A/D コンバータ)
- PayPal エクスプレスチェックアウト (API 決済) の使い方
- Raspberry Pi パッケージ管理コマンド (NOOBS)
- Arduino で作る 7 セグメント LED タイマー
- Arduino で作る温度と気圧の計測基板
- 部屋の温度をツイートする Arduino (外出先から制御)
- 虚仮威しの防犯装置 (Arduino)
- 暗くなるとチカチカ点滅 LED (照度測定器)
作り方
1ページ目 (全 1 ページ)




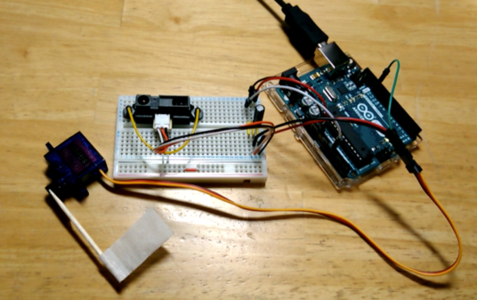
必要なパーツ
セロハンテープ、つまようじ、ティッシュペーパーは、サーボモータに持たせる白旗を作るためのものです。
- シャープ測距モジュール GP2Y0A21YK x1
- サーボモータ SG92R x1
- 電解コンデンサ 10μF x1
-
Arduino UNO R3
x1
-
ブレッドボード
-
ジャンプワイヤ
-
短めのジャンプワイヤ
- セロハンテープ、つまようじ、ティッシュペーパー
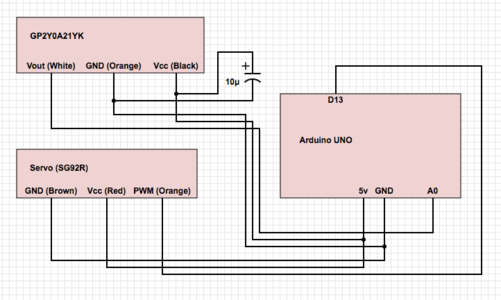
回路図
GP2Y0A21YK は瞬間的に大きな電流が必要になることがあるため、電解コンデンサを付近に設置しています。出力電圧を A0 ピンで A/D 変換して読み取ります。Servo モーターはパルス幅によってその角度を指定します。Servo ライブラリを利用すれば Arduino の PWM ピンから簡単に制御できます。
http://schematics.com/project/white-flag-waver-48553/
制御プログラム
サーボモータの不要な振動を抑制するために、過去の距離センサの値を記憶して平均したり、一の位と十の位の値を切り捨てたりしています。servo.write() には 0-180 の値を入力できますが、距離センサが 3V 程度の電圧までしか出力しないため、実際に白旗が振り上がるのは 108 度程度までとなります。
#include <Servo.h>
#define SERVO_PWM_PIN 13
#define DISTANCE_INPUT_PIN 0
// サーボモータを制御するためのオブジェクトを生成
Servo servo;
// サーボモータをできるだけなめらかに制御するために、
// 過去の距離センサの値を記憶します。
const int BUF_SIZE = 64;
int buf[BUF_SIZE];
int k = 0;
void setup() {
// サーボモータの初期化
servo.attach(SERVO_PWM_PIN);
// 距離センサの値で配列を初期化
for(int i = 0; i < BUF_SIZE; ++i) {
buf[i] = analogRead(DISTANCE_INPUT_PIN);
}
}
void loop() {
// 距離センサから値を読み取ります。
buf[k] = analogRead(DISTANCE_INPUT_PIN);
// 過去の距離センサの値を平均します。
long avg = 0;
for(int i = 0; i < BUF_SIZE; ++i) {
avg += buf[i];
}
avg /= BUF_SIZE;
// サーボモータの角度を計算して PWM 制御します。
// 一の位と十の位を切り捨てることで、サーボモータの不要な振動を抑制します。
int deg = map(avg/100, 0, 10, 0, 180); // 0-1023 を 0-180 に変換
servo.write(deg);
// 次のインデックスに進めます。
k = (k + 1) % BUF_SIZE;
}