- Looker から Snowflake への OAuth 接続
- Looker (Google Cloud core) 30日間 フリートライアル設定
- AWS 落穂拾い (Security)
- AWS 落穂拾い (Storage)
- マイクロマウス




概要
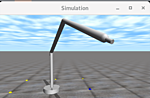
産業用ロボットには、垂直多関節ロボット (Articulated) や水平多関節ロボット (SCARA) があります。ロボットにはジョイントとリンクがあり、ジョイントの関節値を指定することで制御できます。
- 関節値を指定して、位置姿勢を求める場合を順運動学 (Forward Kinematics) とよびます。
- 位置姿勢を指定して、関節値を求める場合を逆運動学 (Inverse Kinematics) とよびます。
例えば、Motion planning でロボットのアームの先端にあるデバイス (エンドエフェクタ、マニピュレータ) の位置姿勢を指定したときに取り得る関節値を求めるためには、後者の IK を解きます。IK を解くためには OpenRAVE の IKFast モジュールが利用できます。
目標点 (IK goal) の準備
ロボットに行わせたいタスクによって、目標となるマニピュレータの位置姿勢 IK goal を決めます。これを動的に生成する必要がある場合もありますが、ここではマニピュレータを固定位置に動かしたいとします。向きを指定する場合は Transform6D で解きます。向きを指定しない場合は Translation3D で解きます。
また、OpenRAVE Custom XML Format で記述された puma ロボットを利用することにします。
openrave.py -i src/robots/puma.robot.xml

ロボット名を取得
robot.GetName()
ジョイントの数を取得 (DOF; degrees of freedom)
robot.GetDOF()
ジョイントの値を取得、設定
robot.GetDOFValues()
robot.SetDOFValues([0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7])
リンクの変換行列を取得
T = robot.GetLinks()[1].GetTransform()
変換行列で位置姿勢を設定
from openravepy import matrixFromAxisAngle
from numpy import pi
# ワールド座標系における Z 軸まわりに 45度回転
Tz = matrixFromAxisAngle([0, 0, pi/4])
robot.SetTransform(Tz.dot(robot.GetTransform()))
ログレベルを変更
RaveSetDebugLevel(DebugLevel.Verbose)
環境を複数扱うことができます。
env2 = Environment()
robot2 = env2.ReadRobotXMLFile(filename='src/robots/puma.robot.xml')
env2.AddKinBody(robot2)
関節値に設定できる値の範囲を調べる
manip = robot.GetActiveManipulator()
lower,upper = robot.GetDOFLimits(manip.GetArmIndices())
ロボット自身の衝突および環境との衝突を調べる
robot.CheckSelfCollision()
env.CheckCollision(robot)
環境のファイル保存
env.Save('newenv.zae', Environment.SelectionOptions.Everything)
IK を解く
マニピュレータが目標点にあるときに取ることができる関節値を、周囲の環境との衝突も考慮して計算します。解は複数存在し得ります。
Transform6D
マニピュレータの位置だけでなく向きも指定して IK を解きます。
# マニピュレータを取得
manip = robot.GetActiveManipulator()
# 初回のみ ikmodel を生成します。時間がかかりますが一度計算しておけば IK を解く際に再利用できます。
ikmodel = databases.inversekinematics.InverseKinematicsModel(robot, iktype=IkParameterization.Type.Transform6D)
ikmodel.autogenerate()
# 目標点を設定します。
Tgoal = numpy.array([
[ 0, -1, 0, -0.21],
[-1, 0, 0, 0.04],
[ 0, 0, -1, 0.92],
[ 0, 0, 0, 1]])
# 衝突を考慮しつつ IK を解きます。
sol = manip.FindIKSolution(Tgoal, IkFilterOptions.CheckEnvCollisions)
# 関節値をロボットに設定してみます。
robot.SetDOFValues(sol, manip.GetArmIndices())
env.UpdatePublishedBodies()
関節値を指定すると、確かに目標点に指定した位置姿勢にマニピュレータが移動されました。
tManipToWorld = manip.GetEndEffectorTransform()
In [25]: tManipToWorld[:3,:3]
Out[25]:
array([[ 6.66133815e-15, -1.00000000e+00, -4.31315374e-15],
[-1.00000000e+00, -6.66133815e-15, 1.57684927e-15],
[-1.57684927e-15, 4.31315374e-15, -1.00000000e+00]])
In [26]: tManipToWorld[:,3]
Out[26]: array([-0.21, 0.04, 0.92, 1. ])
Translation3D
マニピュレータの位置だけを指定して IK を解きます。複数の解が存在し得ります。
# マニピュレータを取得
manip = robot.GetActiveManipulator()
# 今回は Translation3D を指定します。
ikmodel = databases.inversekinematics.InverseKinematicsModel(robot,iktype=IkParameterization.Type.Translation3D)
ikmodel.autogenerate()
# 目標点を設定します。
# ここでは以下のような関節値を設定したときの
robot.SetDOFValues([2.58, 0.547, 1.5, -0.7], [0,1,2,3]) # set the first 4 dof values
# マニピュレータの位置を目標点とします。向きは指定しません。
tManipToWorld = manip.GetEndEffectorTransform()
ikparam = IkParameterization(tManipToWorld[0:3,3], ikmodel.iktype) # build up the translation3d ik query
# IK を解きます。
sols = manip.FindIKSolutions(ikparam, IkFilterOptions.CheckEnvCollisions)
raveLogInfo('%d solutions' % len(sols))
# 目標点の位置に印を表示してみます。
h = env.plot3(tManipToWorld[0:3,3], 10) # plot one point
# 関節値をロボットに設定してみます。
for sol in sols:
robot.SetDOFValues(sol, manip.GetArmIndices())
env.UpdatePublishedBodies()
time.sleep(10.0/len(sols))
ikmodel を保存して次回以降に利用するためには以下のようにします。
In [13]: ikmodel.save()
openravepy.databases.inversekinematics: save, inversekinematics generation is done, compiled shared object: /home/xxx/.openrave/kinematics.9559e67e82872bf8fa24cbb50bdc4388/ikfast0x1000004a.Translation3D.x86_64.0_1_2_f3_4_5.so
以下のようにして読み込みます。ikmodel.autogenerate() は不要です。
In [2]: ikmodel.load()
openravepy.databases.inversekinematics: GetDefaultIndices, found 3-intersection centered on index 4
Out[2]: True
RRT で経路計画を行う
OpenRAVE には RRT (Rapidly-exploring random tree) でロボットの軌道 trajectory を計画する機能があります。これを利用して、IK で解いた関節値になるようにロボットを移動させてみます。OpenRAVE には RRT を両端から行う BiRRT (Bi-directional RRTs) が実装されています。
# create the interface for basic manipulation programs
manipprob = interfaces.BaseManipulation(robot)
# DOF Value を指定します。
manipprob.MoveManipulator(goal=[-1, 0, 1, 1, 1, 1])
In [29]: robot.GetDOFValues()
Out[29]:
array([-1.00000000e+00, -1.11022302e-15, 1.00000000e+00, 1.00000000e+00,
1.00000000e+00, 1.00000000e+00, 2.11177436e-14])

IK と RRT をまとめて行う
マニピュレータの位置姿勢を Transform6D で指定して IK を解いて関節値を得て、RRT で関節値になるようにロボットを移動させる、という二つのことをまとめて行うためには以下のようにします。
ikmodel = databases.inversekinematics.InverseKinematicsModel(robot, iktype=IkParameterization.Type.Transform6D)
if not ikmodel.load():
ikmodel.autogenerate()
manipprob = interfaces.BaseManipulation(robot)
Tgoal = numpy.array([
[ 0, -1, 0, -0.21],
[-1, 0, 0, 0.04],
[ 0, 0, -1, 0.92],
[ 0, 0, 0, 1]])
res = manipprob.MoveToHandPosition(matrices=[Tgoal], seedik=10) # call motion planner with goal joint angles
軌道 trajectory を取得
res = manipprob.MoveToHandPosition(matrices=[Tgoal], seedik=10) # call motion planner with goal joint angles
ロボットを実際に移動させる前に、計画した軌道を取得することができます。
traj = manipprob.MoveToHandPosition(matrices=[Tgoal], execute=False, outputtrajobj=True)
軌道は複数の waypoint で区切られています。
raveLogInfo('traj has %d waypoints, last waypoint is: %s' % (traj.GetNumWaypoints(), repr(traj.GetWaypoint(-1))))
ロボットを移動させるためには以下のようにします。
robot.GetController().SetPath(traj)
各 waypoint における関節値を取得するためには以下のようにします。関節値の他に、速度やタイムスタンプなどの情報が含まれています。
for i in range(traj.GetNumWaypoints()):
data=traj.GetWaypoint(i)
dofvalues = traj.GetConfigurationSpecification().ExtractJointValues(data, robot, robot.GetActiveDOFIndices())
raveLogInfo('waypoint %d is %s' % (i, dofvalues))
OpenRAVE の関連機能
動力学シミュレータ ode (Open Dynamics Engine) の利用
# ode の読み込み
physics = RaveCreatePhysicsEngine(env, 'ode')
env.SetPhysicsEngine(physics)
# シミュレーションを停止しておきます。
env.StopSimulation()
# 重力を設定します。
physics.SetGravity(numpy.array((0, 0, -9.8)))
# ロボットの土台が落下しないようにしてみます。
robot.GetLinks()[0].SetStatic(True)
# シミュレーションを開始してみます。
env.StartSimulation(timestep=0.001)
# 5秒間だけジョイントの一つにトルクを加えてみます。右方向に回転します。
robot.GetDOFTorqueLimits()
for i in range(500):
robot.SetDOFTorques([100, 0, 0, 0, 0, 0, 0], True)
time.sleep(0.01)
# シミュレータを終了します。
env.SetPhysicsEngine(None)
IK goal を動的に生成する例
IK goal を動的に生成する例として、ワークをマニピュレータで把持する場合を考えます。ロボットとマグカップが存在する環境をロードします。
openrave.py -i src/data/lab1.env.xml
マグカップの一つを把持対象として設定します。把持対象とマニピュレータの組で Grasping Model を生成します。対象を把持できる可能性のあるマニピュレータの姿勢をすべて生成するため、モデルの作成には時間がかかります。Box などの簡単な形状の把持対象よりも Cylinder などの場合の方が時間がかかります。
target = env.GetKinBody('mug1')
gmodel = databases.grasping.GraspingModel(robot, target)
if not gmodel.load():
gmodel.autogenerate()

モデルを解いて把持セットを出力します。複数の解が存在し得りますが、一つだけ取得してみます。存在しないこともあります。
validgrasps, validindicees = gmodel.computeValidGrasps(returnnum=1)
このように、把持セットは把持対象に応じて動的に生成されます。動的に生成された把持セットが IK goal となり ikmodel に入力されます。RRT まで含めて IK を解いてみます。把持対象を把持するための軌道において、把持対象とロボットの衝突は回避 collisionfree=True する設定にしてみます。移動後に把持する際には衝突します。
gmodel.moveToPreshape(validgrasps[0])
Tgoal = gmodel.getGlobalGraspTransform(validgrasps[0], collisionfree=True)
manipprob = interfaces.BaseManipulation(robot)
manipprob.MoveToHandPosition(matrices=[Tgoal])