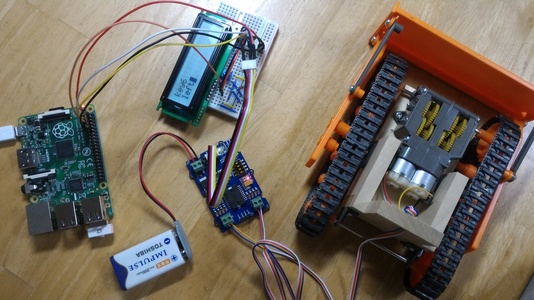
「AWS IoT ボタン」を用いずにインターネット経由でスマホによるラジコン操作
制御プログラムを作る (3日目)
3ページ目 (全 6 ページ)
- 任意の言語で Raspberry Pi デジタル入出力、アナログ出力 (PWM)
- Raspberry Pi で I2C を利用するための設定
- Raspberry Pi アナログ入力 (I2C A/D コンバータ)
- PayPal エクスプレスチェックアウト (API 決済) の使い方
- Raspberry Pi パッケージ管理コマンド (NOOBS)
- Arduino で作る 7 セグメント LED タイマー
- Arduino で作る温度と気圧の計測基板
- 部屋の温度をツイートする Arduino (外出先から制御)
- 手を振りかざすと白旗を上げて降参する Arduino
- 虚仮威しの防犯装置 (Arduino)
注目の記事


制御プログラム
websocket_clients のうち、Ruby のサンプルコードをもとにしました。ruby はバージョンが 2.1.3 のものを使用しました。依存 Gem が一つだけありますので、事前にインストールしておきます。
sudo gem install websocket-client-simple -v 0.3.0
bulldozer.rb
#!/usr/bin/ruby
# -*- coding: utf-8 -*-
require 'json'
require 'logger'
require 'websocket-client-simple'
API_TOKEN = 'XXXX-XXXX-XXXX-XXXX'
API_ENDPOINT = 'wss://api.qoosky.io/v1/controller/actuator/ws'
LCD_PIN = 4
$logger = Logger.new STDOUT
$last_time = Time.now
$speed = 70 # 9V 電源で 2.5V 程度の計算になります。
def lcd_update(key)
line1 = ["0x00 0x01", # クリア
"0x00 0x02", # HOME
"0x80 0x6b", "0x80 0x65", "0x80 0x79", # key
"0x80 0x#{(48+key).to_s(16)}",
"0x80 0x20", "0x80 0x#{($speed/70.0*2.5 + 48).round.to_s(16)}", "0x80 0x76", # 0-9v
"0x00 0xc0"] # 改行
case key
when 3
line2 = %w(73 70 65 65 64 20 75 70) # speed up
when 4
line2 = %w(73 70 65 65 64 20 64 6f 77 6e) # speed down
when 5
line2 = %w(66 6f 72 77 61 72 64) # forward
when 8
line2 = %w(62 61 63 6b 77 61 72 64) # backward
when 6
line2 = %w(6c 65 66 74) # left
when 7
line2 = %w(72 69 67 68 74) # right
else
line2 = %w(75 6e 64 65 66 69 6e 65 64) # undefined
end
line1.each{|ch| system "i2cset -y 1 0x50 #{ch}"}
line2.each{|ch| system "i2cset -y 1 0x50 0x80 0x#{ch}"}
end
def motor_drive(key)
hex = $speed.to_s(16)
case key
when 3 # speed up
$speed += 10
hex = '00'
when 4 # speed down
$speed -= 10
hex = '00'
when 5 # forward
system "i2cset -y 1 0x0f 0xaa 0x05 0x01 i"
when 8 # backward
system "i2cset -y 1 0x0f 0xaa 0x0a 0x01 i"
when 6 # left
system "i2cset -y 1 0x0f 0xaa 0x09 0x01 i"
when 7 # right
system "i2cset -y 1 0x0f 0xaa 0x06 0x01 i"
else
hex = '00'
end
system "i2cset -y 1 0x0f 0x82 0x#{hex} 0x#{hex} i"
end
begin
# WebSocket SSL クライアント
ws = WebSocket::Client::Simple.connect API_ENDPOINT
# コネクション確立時のイベント
ws.on :open do
if ws.handshake.valid?
$logger.info 'Successfully connected to the API server.'
ws.send({ token: API_TOKEN }.to_json)
# LCD バックライト ON
system "gpio -g mode #{LCD_PIN} out"
system "gpio -g write #{LCD_PIN} 1"
# LCD 初期化
system "i2cset -y 1 0x50 0x00 0x01"
system "i2cset -y 1 0x50 0x00 0x38"
system "i2cset -y 1 0x50 0x00 0x0f"
system "i2cset -y 1 0x50 0x00 0x06"
else
ws.emit :error, 'websocket handshake failed.'
end
end
# エラー時のイベント
ws.on :error do |err|
$logger.error "An unexpected error has occurred: #{err}"
ws.emit :close
end
# コネクション切断時のイベント
ws.on :close do |e|
raise "Connection closed."
end
# メッセージ受信時のイベント
ws.on :message do |msg|
$logger.info "received: #{msg}"
json = JSON.parse msg.to_s
if key = json['pushedKey']
lcd_update(key)
motor_drive(key)
end
$last_time = Time.now
end
# メインスレッド待機
timer = 100
loop do
if (timer == 0)
timer = 100
msg = "keep-alive message."
ws.send msg
$logger.info "sent: #{msg}"
else
timer -= 1
if Time.now - $last_time > 0.5
$logger.info("motor stop")
system "i2cset -y 1 0x0f 0x82 0x00 0x00 i" # モーター停止
end
end
sleep 0.1
end
rescue => e
$logger.warn "An error occurred: #{e}\nretrying..."
sleep 5
retry # 再試行
ensure
# 終了時に消灯して初期化
system "gpio -g write #{LCD_PIN} 0"
system "i2cset -y 1 0x50 0x00 0x01"
end
実行方法
ruby bulldozer.rb
動作概要
ボタン番号に応じて以下の動作をします。
| ボタン番号 | 動作 |
|---|---|
| 1 | 未定義 |
| 2 | 未定義 |
| 3 | 加速 (初期値は 9V 電源でモーター電圧 2.5V) |
| 4 | 減速 (初期値は 9V 電源でモーター電圧 2.5V) |
| 5 | 前進 |
| 6 | 左回転 |
| 7 | 右回転 |
| 8 | 後退 |
10 秒毎に keep-alive メッセージを送信してサーバーからの切断を防ぎます。ネットワーク障害などが原因でコネクションが切断された時は自動で再接続します。加速と減速は電源電圧が低下してきた場合に利用します。加速しすぎるとモーターが故障する原因になりますので注意してください。
試験的に操作してみます。
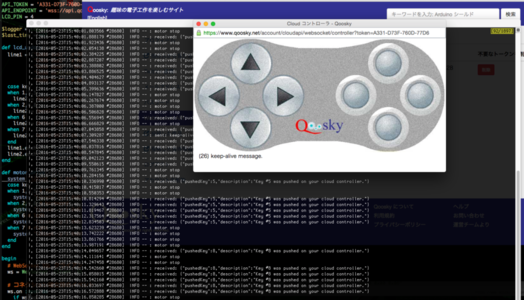
前進、後退、右回転、左回転の操作ができることを確認します。回線速度に依存する部分もありますが、反応もリアルタイムです。